List of KIMM TechnologiesResearch Institute of AI Robotics

Gripper for Assembly and Assembling Technology Applicable for Wide Use Industrial Robot
| Division | KIMM Institute of AI Robotics > Department of Robotics and Mechatronics |
|---|---|
| Name | Dr. Hwisu Kim, Dr. Chanhoon Park, Dr. Dongil Park |
| Department | Department of Robotics and Mechatronics |
| Tel | +82 - 42 - 868 – 7208 |
| [email protected], [email protected], [email protected] | |
| Attachment | Download 046_Gripper_for_Assembly_and_Assembling_Technology_Applicable_for_Wide_Use_Industrial_Robot.pdf (0.8 KB) |
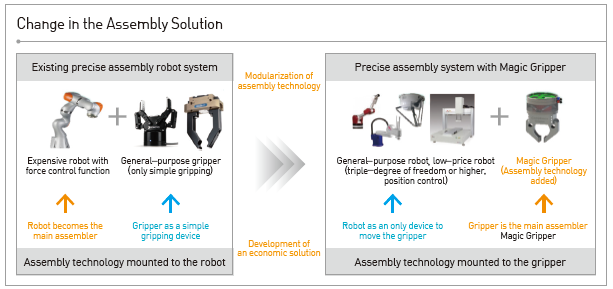
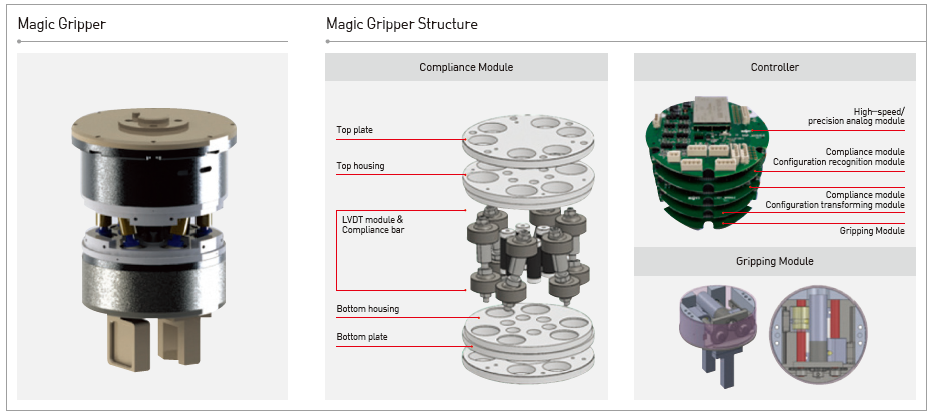
All-in-one magic gripper for precision component assembly and assembly process technology using the gripperPassive compliance gripper integrating teaching technology, correction technology, and assembly strategy for precision IT product components assembly, assembly robot system and assembly technologyAssembly process analysis and gripping mechanismPassive compliance gripper for assembly processPractical assembly strategy for precision component assemblyVision solution strong against external environment
Client / Market
Necessity of this Technology
Technical Differentiation
Current Intellectual Property Right StatusPATENT
KNOW-HOW
|