List of KIMM TechnologiesResearch Institute of AI Robotics

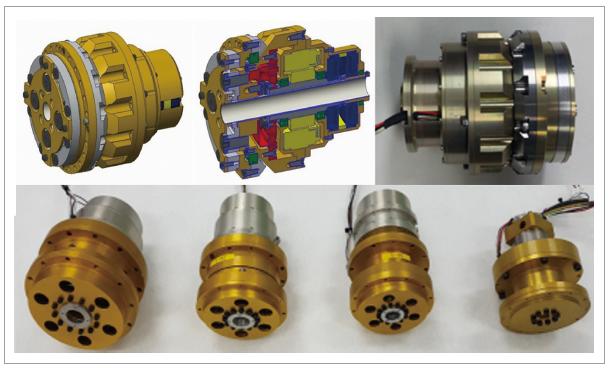
Hollow Driving Module Technology for Slim Robot Arm
| Division | KIMM Institute of AI Robotics > Department of Robotics and Mechatronics |
|---|---|
| Name | Dr. Hwisu Kim, Dr. Dongil Park |
| Department | Department of Robotics and Mechatronics |
| Tel | +82 - 42 - 868 – 7208 |
| [email protected], [email protected] | |
| Attachment | Download 045_Hollow_Driving_Module_Technology_for_Slim_Robot_Arm.pdf (4.0 KB) |
Modularized robot technology for various specifications and applications that users can easily produceHollow Driving module that allows cables (or wires) to pass directly through the axis of rotation axis of robot arm which constructed with multiple modules.
Client / Market
Necessity of this Technology
Technical Differentiation
Excellence of Technology
Current Intellectual Property Right StatusPATENT
KNOW-HOW
|