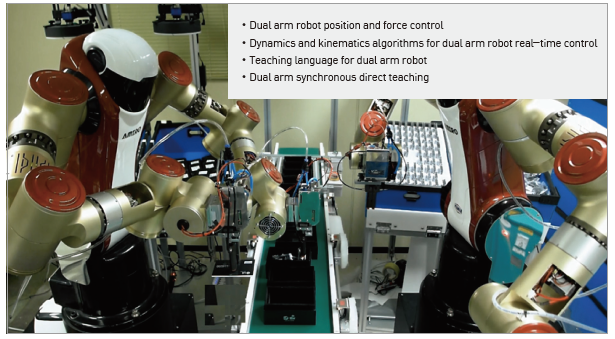
Technology for dual arm robot controller used in the industrial site in recently developed markets
Unlike existing vertical articulated robot, the robot has two arms and two end-effectors. The technology includes dual arm robot language and dual arm robot teaching function to reflect the changes.
Client / Market
- Dual arm robot development companies
- Teaching pendant for dual arm robot development companies
Necessity of this Technology
- Existing industrial vertical articulated robot had one arm and one end-effector, therefore the controller was used to teach and control only one end-effector.
- However, a dual arm robot has two end-effectors that it requires high-level controlling algorithm for two end-effector control, teaching method to teach both arms, and robot language for two arms.
Technical Differentiation
- Direct teaching using partner relationship between the two arms
- Position and force control with the dynamics and kinematics algorithm for realtime control of the dual-arm robot
- The institute has been developing dual arm robot-related controller for 6 years since 2010.
- For application at industrial sites, experiments were conducted for various processes to improve completeness of the control algorithm and teaching method.
- Equipped with real-time control algorithm (dynamics, kinematics) for dual arm robot applicable for industrial robots
Excellence of Technology
- By conducting research on application of dual arm robot in the industrial sites for 6 years, dual arm robot real-time control algorithm (dynamics, kinematics), dual arm robot teaching language and direct teaching function that the industries need were developed.
- The technology developed by the institute was actually applied on a dual arm robot, and its excellence was verified.
Current Intellectual Property Right Status
PATENT
- Robot Teaching Device (KR1263487)
- Dual Arm Robot Direct Teaching Method (KR1193211)
KNOW-HOW
- EtherCAT communication
- Realtime control
|

