Internally, the technology for light but strong integrated actuator
module was developed, which was only used for humanoids or hightech
industrial robots, and applied it to a rehabilitation robot for the
first time to effectively help with rehabilitation treatment of joints in
the upper limbs (hand, arm, shoulder) paralyzed from a stroke
Client / Market
- Senior medical & welfare facility, hospital
Necessity of this Technology
- The demand for upper limb rehabilitation robot technology has increased due
to aging of population and increased number of patients with brain damage in
advanced countries
- Existing technology had not considered or simplified the movement of humerus
head that moves with shoulder movement and had limits with accurately delivering
intended impedance to the patient.
Technical Differentiation
- 6 DOF nonlinear movement of the shoulder joint can be naturally implemented and
the impedance delivered to the user is precisely controlled.
- The unified actuator module is small and light-weighted but with sufficient
output and high safety and precision of the driving and sensing module. It can also
implement high performance impedance control.
- Developed the automatic modeling of rehabilitation procedure of physical therapist
that quantifies the treatment procedure when a physical therapist performs
exercises using a rehabilitation robot on a patient.
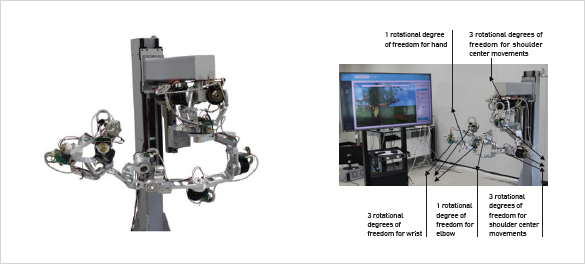
- Instead of using a timing belt, it uses a 4-axis upper limb rehabilitation (3-axis for
shoulder, 1-axis for elbow) mechanism and 3-axis hand rehabilitation (3-axis for
wrist) mechanism.
- Using a torque sensor signal for each axis, high performance impedance control is
possible. For the joint where a lot of weight is loaded, weight is not burdened to the
patient using a brake in case of an unexpected situation.
- Based on the absolute encoder signal, the initial position is automatically set without
having to readjust for every use. With double checking with the incremental encoder,
the control safety is enhanced.
Excellence of Technology
- Developed a high-performance unified actuator module specialized for
rehabilitation robots
- Consists of a motor, a motor drive, a torque sensor, a harmonic drive, an incremental encoder, an absolute encoder, and a brake; a
unified actuator module was designed and fabricated with all components with a thin, hollow shape to be assembled in one housing.
- Developed a prototype of 5th generation unified actuator module that emits the same output as the 1st generation integrated
driving module developed in 2011 but has a weight that is 60% less
- Based on the 5th generation unified actuator module technology, developed a rehabilitation robot for customized treatment by joint
for all upper limb movement for stroke patients
- Developed a GUI (graphic user interface) platform to link with the upper limb rehabilitation robot for patient condition
measurement, rehabilitation protocol input, game treatment, and quantitative data storage and analysis

CURRENT INTELLECTUAL PROPERTY RIGHT STATUS
PATENT
- Robot for Rehabilitating an Upper Extremity (KR1465176)
- Parallel Manipulator (KR1817750)
KNOW-HOW
- Highspeed/Synchronization control of multi-axis driving module usin communication
method
- Impedance controller design technology using analysis of system’s dynamic
properties
- Technology for modeling of nonlinear movement of shoulder joint
|

