
KIMM in MediaKIMM Press Release

[KIMM Press Release] KIMM develops South Korea’s first robotic catheter system for performing heart and lung intervention procedures
- Created2022.04.18
Attached file

KIMM develops South Korea’s first robotic catheter system for performing heart and lung intervention procedures
-Development of a flexible, curved, robotic catheter that can be inserted into the human organs-
- “It will help the domestic medical staffs and patients by ensuring hardware safety” -
For the first time in South Korea, the Korea Institute of Machinery and Materials (President Sang Jin Park, hereafter referred to as KIMM), an institution under the jurisdiction of the Ministry of Science and ICT, has succeeded in developing a robotic catheter system for use in interventional heart, lung, and bladder procedures. This new technology is expected to facilitate the effective treatment of domestic arrhythmia patients and strengthen the technological competitiveness of relevant domestic companies.
The KIMM research team, led by Dr. Kiyoung Kim, a senior researcher at the Department of Medical Robotics, announced that they have developed a flexible, curved, robotic catheter that can be inserted into human organs, such as the heart, lungs, and bladder. This is the first robotic catheter system developed in Korea that can be inserted into human organs.
This newly developed technology is a curved guiding catheter* . The advantage of such a development is that conventional steerable catheters can only be bent in one direction, whereas this new robotic catheter can be bent in two directions, thus allowing for easier movement to any given position. The guiding catheter is composed of two robotic catheters: an outer robotic catheter that stabilizes movement, and an inner robotic catheter that moves the device to the desired position.
This new technology is also characterized by hardware safety. Catheters that are inserted into major organs in the human body must meet the same safety standards as conventional manual catheters. For example, catheters that are inserted into the human heart must be fabricated using the same materials and manufacturing process as conventional catheters. This newly developed robotic catheter is fabricated using the same heat treatment method (reflow process) and the same materials as conventional catheters, thus ensuring the device’s safety.
The secret behind making tension adjustable is the variable stiffness control technology, which can be used to control the structural stiffness of the robotic catheter. By allowing for the adjustment of tension, the robotic catheter can be inserted smoothly with low rigidity, without injuring surrounding tissue. Meanwhile, during a given interventional task, the tension of the robotic catheter can be adjusted to high rigidity, thus making the task easier to complete. Tension adjustment is conducted using a motor that is connected to a driving wire whose tension is measured by a load cell. An electric driving system was developed by adopting a method in which each driving wire is operated by a motor, which correspond to each other on a one-to-one basis.
Another advantage of this newly developed catheter technology is not only that it is softer than conventional catheters developed overseas, but also that its rigidity can be adjusted. One of the problems with foreign products that have been used until now is that they are stiff, which makes them unsuitable for Asian body types.
Furthermore, since this new catheter operates using a master-slave robotic system, it can be used to reduce the radiation exposure of surgeons during procedures for treating arrhythmia.
KIMM Senior Researcher Dr. Kiyoung Kim stated that this achievement is the result of developing a robotic catheter system that can reduce radiation exposure and be made with domestic technology. He added that this development is meaningful because the safety of the robotic catheter is ensured based on the same standards as manufacturing technology for conventional catheters. He also emphasized that the operation of the catheter is simplified and its rigidity can be controlled using robotic technology. Finally, he shared his hope that, through collaborative relationships with various institutions, such as companies and hospitals, and followup research for commercialization, this technology can be used to help patients with heart, lung, and bladder diseases.”
[List of Attachments] - Attachment 1: Photos of the developed robotic catheter (Photos)
The Korea Institute of Machinery and Materials (KIMM) is a non-profit governmentfunded research institute under the Ministry of Science and ICT. Since its foundation in 1976, KIMM is contributing to economic growth of the nation by performing R&D on key technologies in machinery and materials, conducting reliability test evaluation, and commercializing the developed products and technologies.
This research study was carried out with support from a project sponsored by the Ministry of Trade, Industry and Energy called “Industrial Technology Innovation Project: 3-D Heart Mapping Systems and the Development of an Intelligent Cardiovascular Interventional Assistive Robotic System Based on Vascular Visualization Technology.”
Credit : The Korea Institute of Machinery and Materials (KIMM)
Usage Restrictions of Multimedia (Attachment File) : The sources of photos and research results from KIMM must be specified.
- Attachment 1: Photos of the developed robotic catheter (Photos)
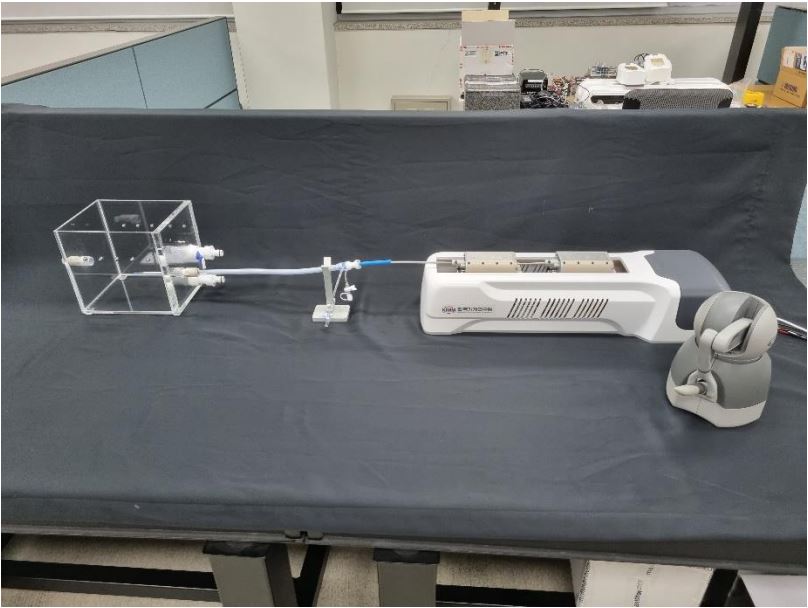
Description: A full-view of the entire robotic catheter system: the system is composed of a long robotic catheter (left), a robotic body to which a robotic catheter is attached (center), and a master control device to operate the robotic catheter (right).

Description: Robotic body for interventional procedures: a robotic body equipped with a motor and a motion controller to steer the Robotic catheter, which can be detached from the robotic body.
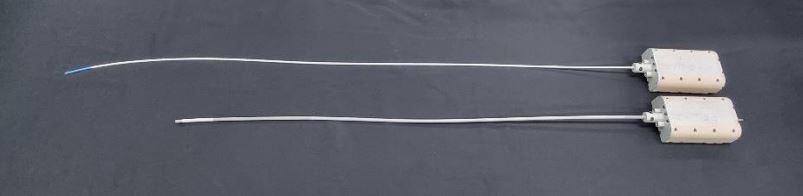
Description: Parts of the robotic catheter: two long and slender robotic catheter parts with diameters of 4.7 mm and 2.8 mm, that are inserted into the human body.
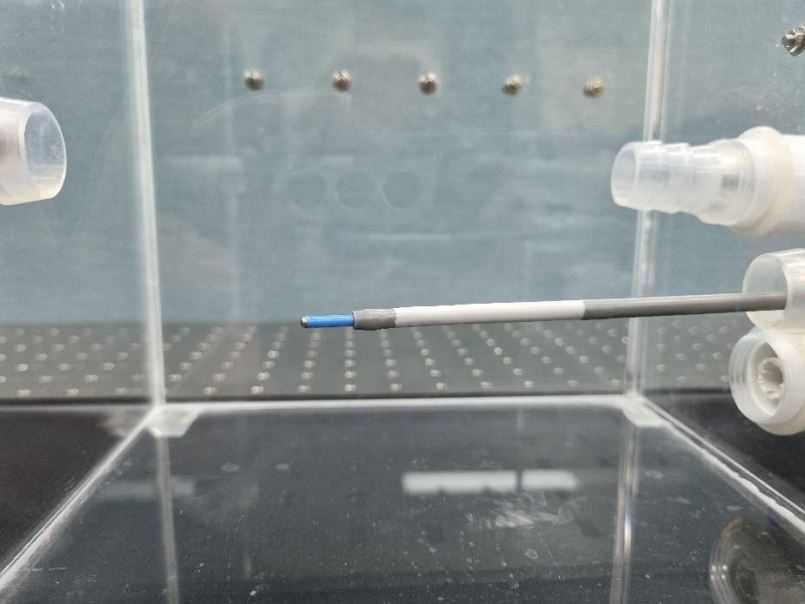
Description: The distal end/curved part of the robotic catheter: a view of both the outer guiding catheter and inner guiding catheter inserted together; the white tube is the outer guiding catheter, and the blue tube shown in the left is the inner guiding catheter.
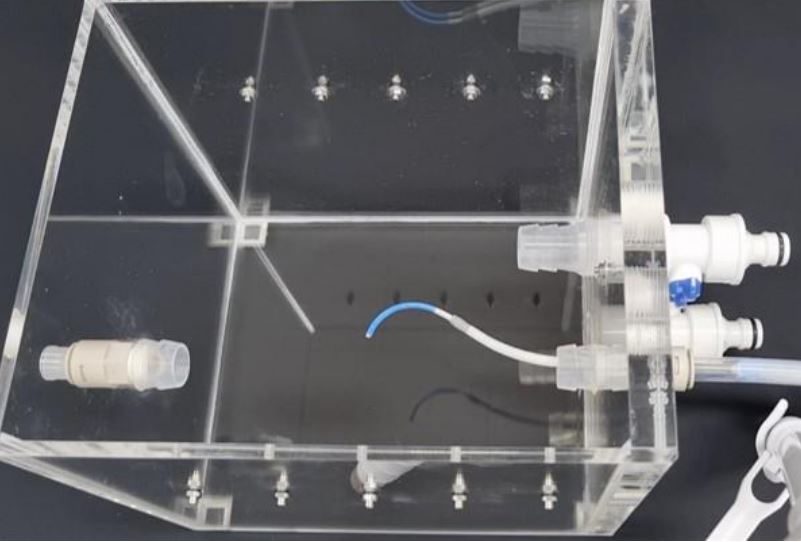
Description: Robotic catheter main bending site, that can be bent up to 90 degrees.

Description: A photo of robotic catheter distal bending site. This is an inner guiding catheter with a diameter of 2.8 mm.
Attached file
